低コストなのに超絶器用で靴ひもを結んだり卵を割ったり料理したりも可能なマニピュレーター「Mobile ALOHA」

スタンフォード大学の学生で、GoogleのAI研究開発部門であるGoogle DeepMindでも働く学生研究者のTony Z. Zhao氏は、低コストのオープンソースマニピュレーター「Mobile ALOHA」を開発しています。Mobile ALOHAは靴ひもを結んだり卵を割ったり料理をしたりすることが可能という、超絶器用なマニピュレーターです。
Mobile ALOHA
https://mobile-aloha.github.io/
さまざまなマニピュレーターやロボットアームが開発されていますが、そのほとんどが「卓上での操作」に焦点を当てて設計されているため、一般的な作業に役立つ「機動性」や「器用さ」に欠けるそうです。そこで、「人間による両手での全身制御タスク」を模倣できるようなシステムをZhao氏ら研究チームは開発しており、その第一歩として低コストのオープンソースマニピュレーター「Mobile ALOHA」を発表しています。
研究チームによるとMobile ALOHAで収集したデータを使用して教師あり学習を用いてマニピュレーター操作用のAIクローンを作成し、既存のMobile ALOHA用データセットと合わせてトレーニングを行うことで、Mobile ALOHAでの操作タスクのパフォーマンスを向上させることが可能だとのこと。
また、タスクごとに50回のデモンストレーションを実施すると、通常のトレーニング時よりもタスクの成功率を最大90%高めることが可能で、その結果、Mobile ALOHAを用いてエビのソテーを調理したり、キッチンの蛇口をひねって鍋をすすぎ洗いしたりといった動作を実現することができると説明しています。
以下の動画を見ればMobile ALOHAがいかに器用かが一発でわかります。
Mobile ALOHA Robot - Teleoperating a 3-Course Cantonese Meal - YouTube
動画ではMobile ALOHAを使って3品の中華料理を作っています。最初に作るのは「エビと卵の炒めもの」。

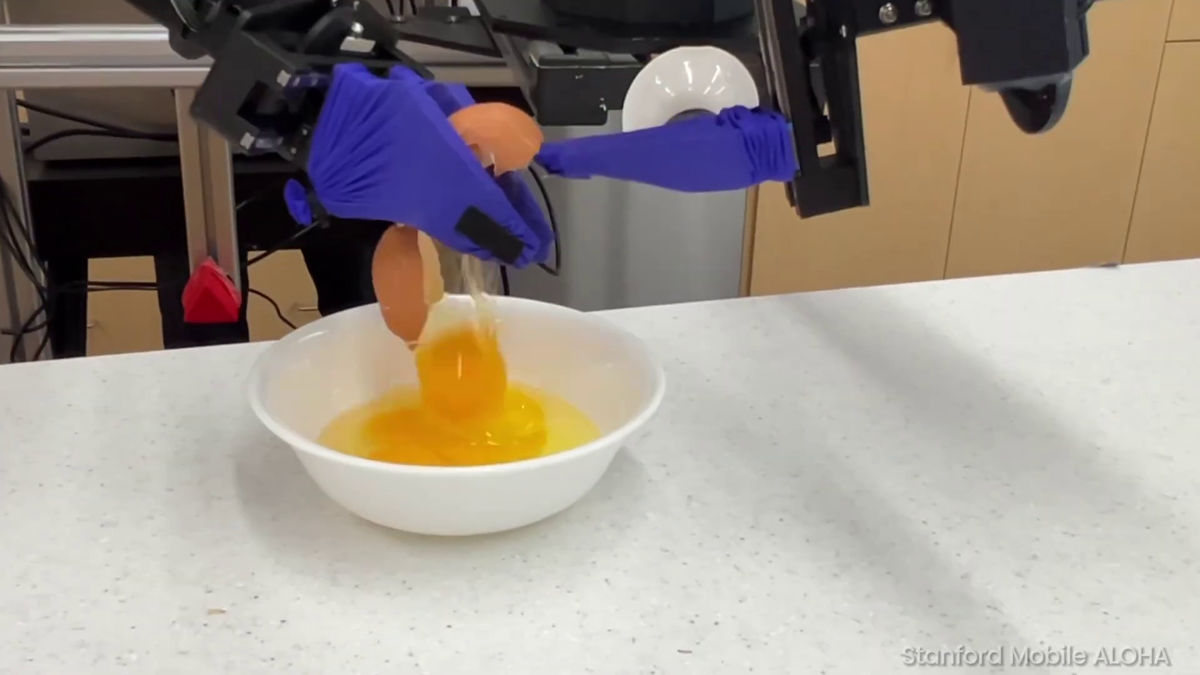
まずは片方のマニピュレーターで卵をテーブルに軽くコンコンと打ち付けます。
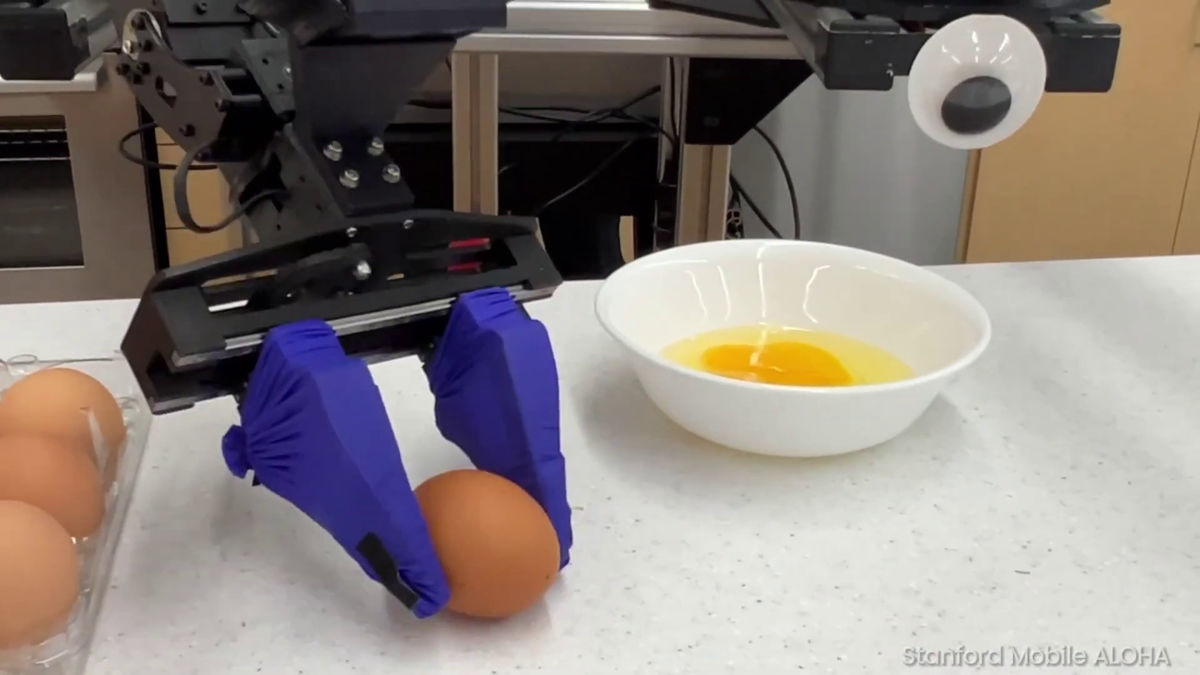
そして、お皿の上で片方のマニピュレーターを卵にコツコツと当て、上手に卵を割りました。
続いて、熱湯にむきえびを投入。
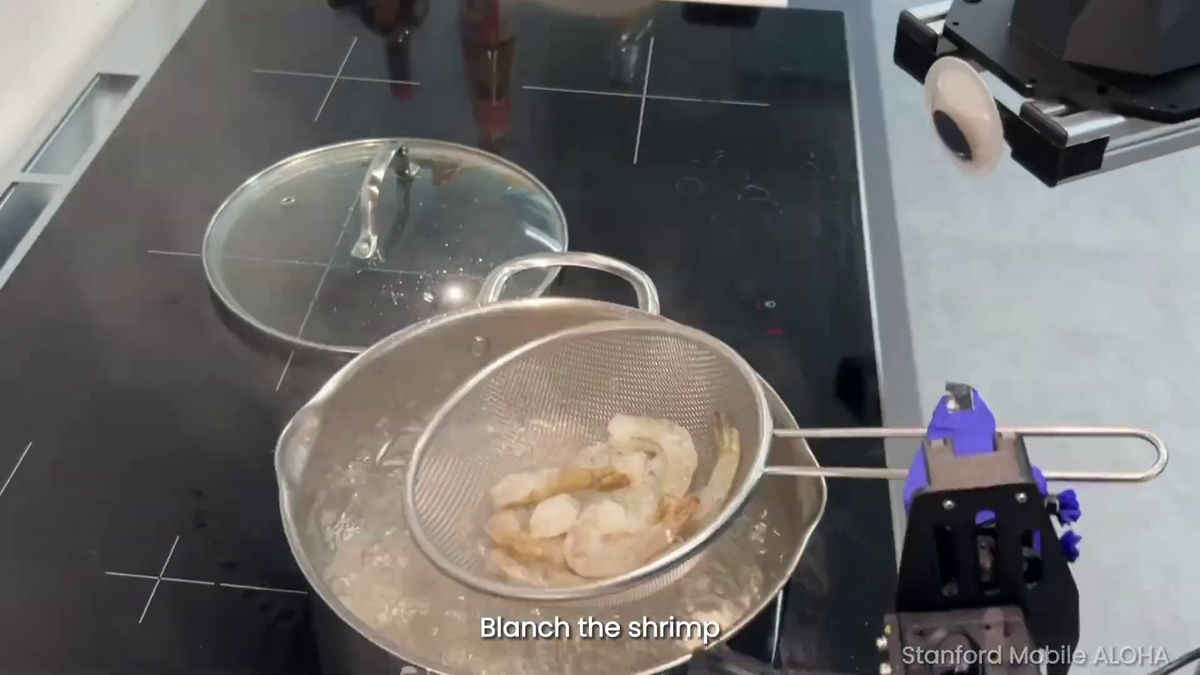
えびの色が変わったら引き上げます。

溶き卵をフライパンに投入。
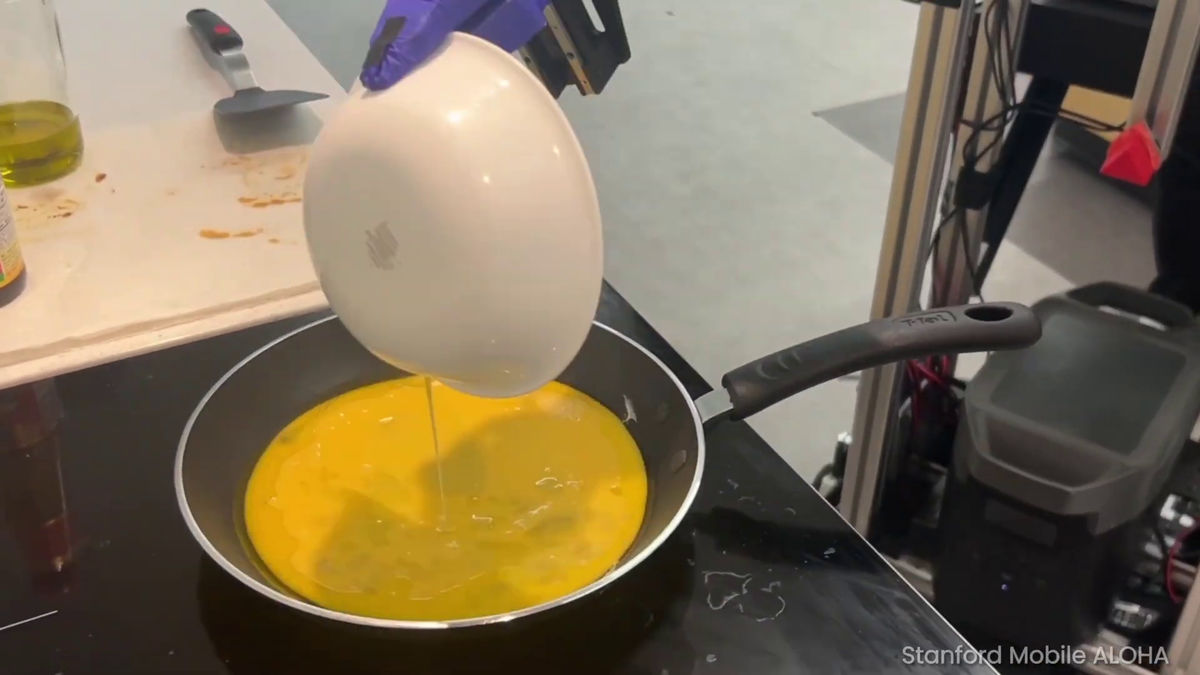
そして茹でたえびも入れて一緒に炒めれば完成です。

2品目は「チキンのソテー」を作ります。

鶏肉を皮目を下にしてフライパンで焼きます。

ヘラで裏返すと皮がきれいなきつね色に焼けていました。

両面を焼いたらショウガと青唐辛子を投入。

さらに乾燥ホタテを水で戻したものを加えます。

そして醤油を入れ、フタをして20分じっくり火入れ。

あとはお皿に盛ります。
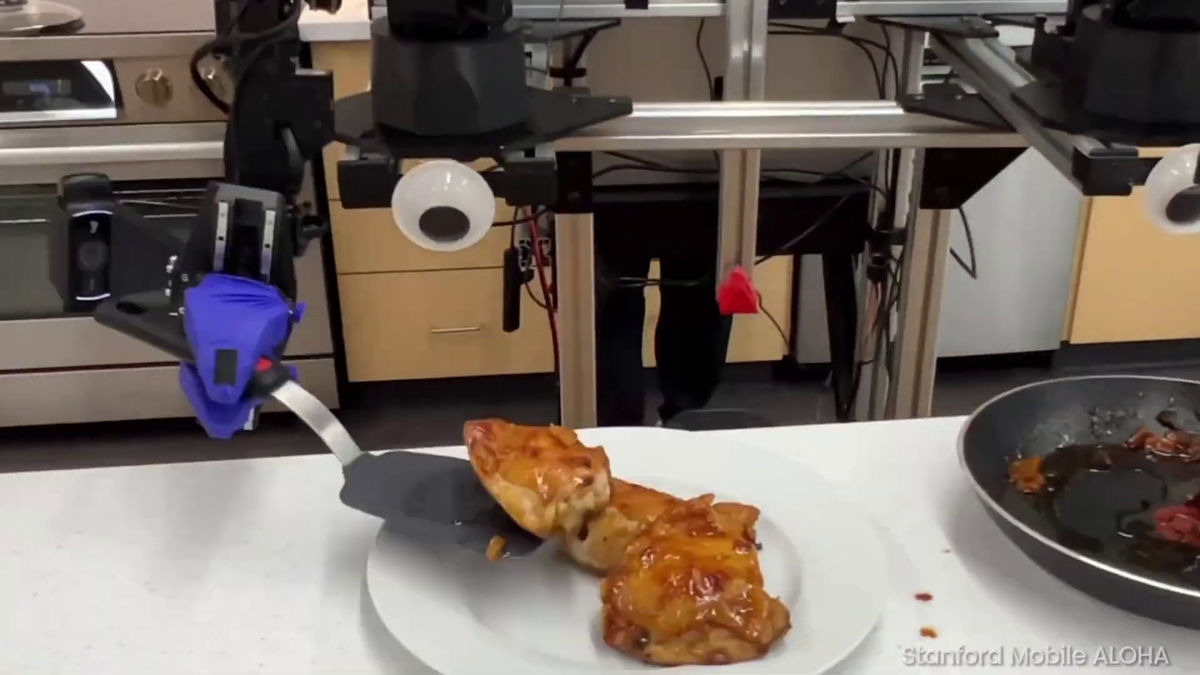
最後にねぎを散らして完成。

3つ目のメニューは「レタスのオイスターソースたれ」です。

まずはビニール袋を2つのマニピュレーターで取り扱い、器用に袋を開けます。

片方のマニピュレーターで包丁を保持し、もう片方でレタスを押さえ、根元を切り落とします。

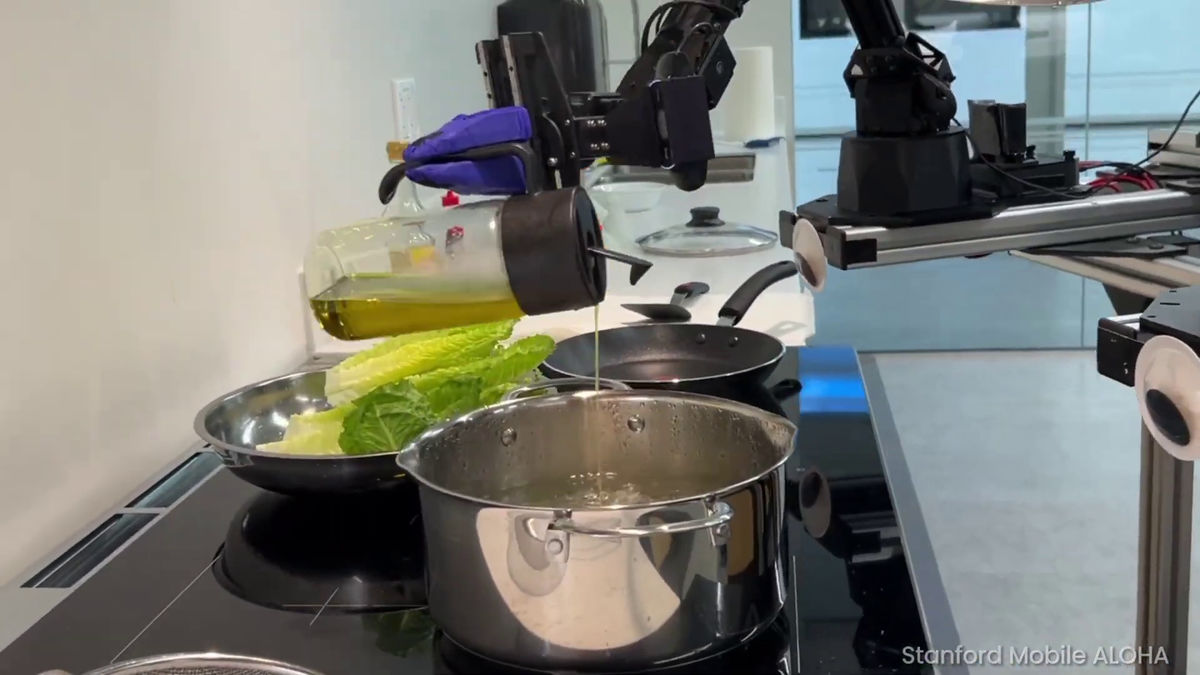
沸騰したお湯を用意して、ここに油を入れます。
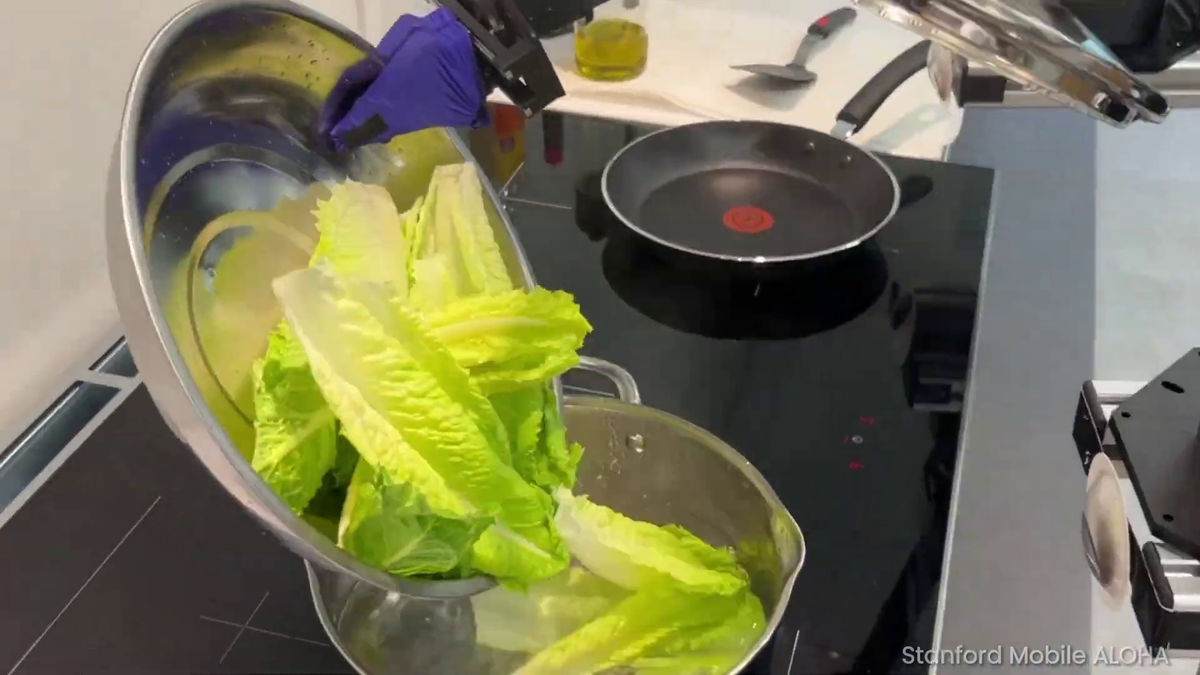
続いてレタスを投入。
火が通ったら引き上げます。

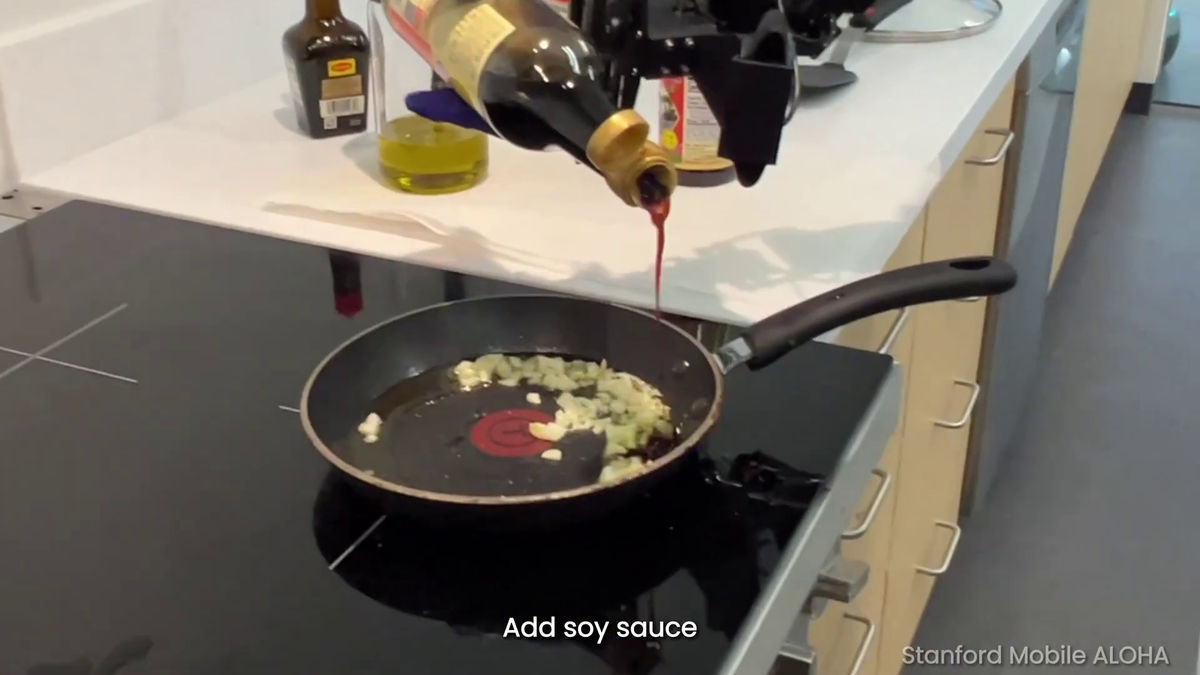
次に、にんにくをみじん切りにします。

油をひいたフライパンにニンニクを入れ、加熱しながら醤油を入れます。
続いてオイスターソースを投入。
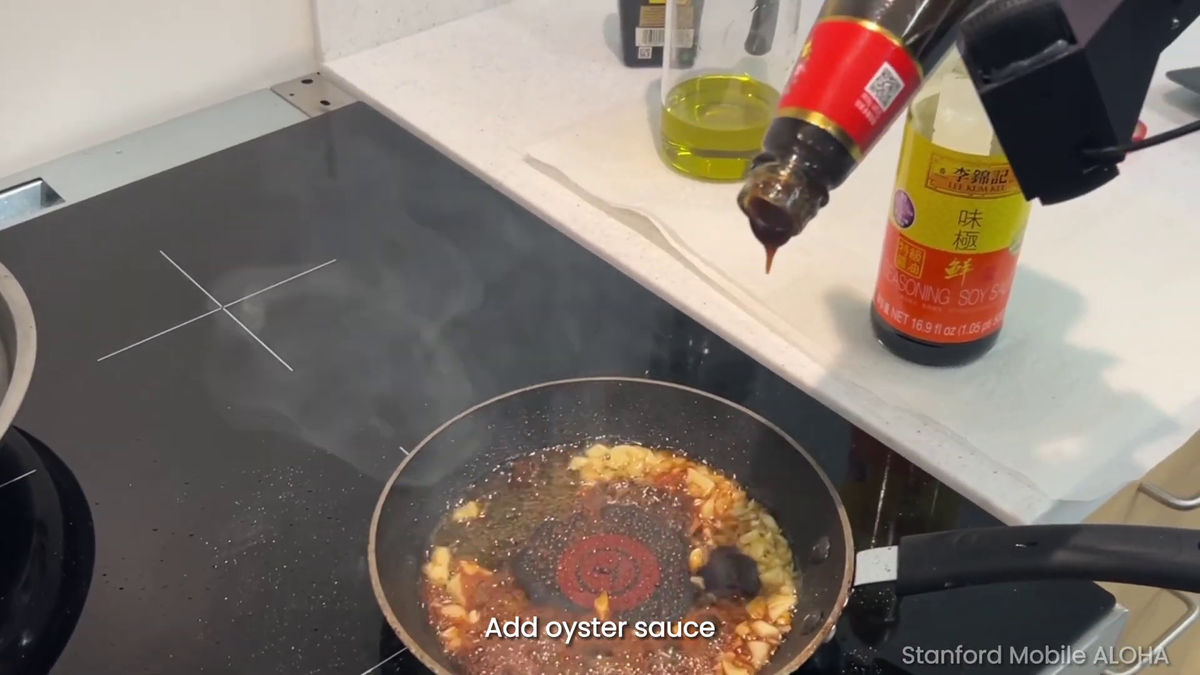
ヘラでしっかり混ぜ混ぜ。

ソースができたら茹でたレタスにかければ完成です。

Mobile ALOHAが作った3つの料理は以下の通り。とてもロボットだけで作った料理とは思えない見た目です。

さらに、Zhao氏はMobile ALOHAで靴ひもを結んだりTシャツをハンガーにかけたりする動画を公開しています。
Introducing ???????????????????? ???????????????????????????????????? 🌋 - Pushing the boundaries of dexterity with low-cost robots and AI. @GoogleDeepMind
— Tony Z. Zhao (@tonyzzhao)
Finally got to share some videos after a few months. Robots are fully autonomous filmed in one continuous shot. Enjoy! pic.twitter.com/5cREmQ9hqL
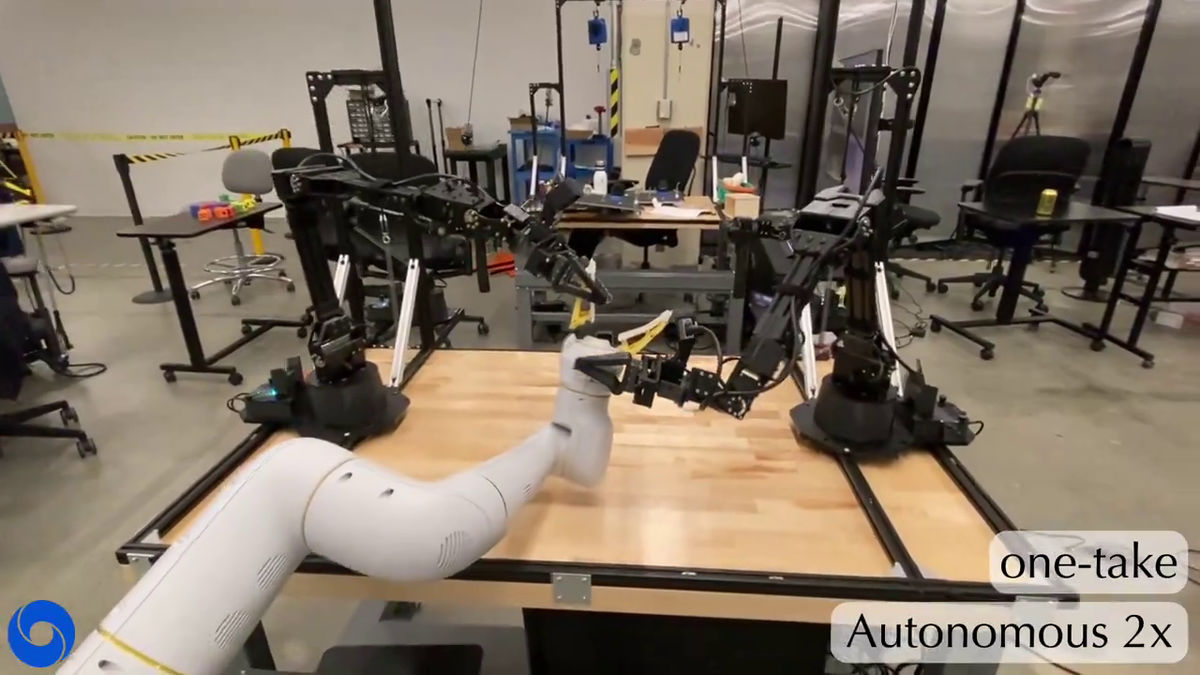
まずは故障してしまったロボットアーム(白色)の先端部分のパーツを交換します。
黒色の2本のマニピュレーターが、ロボットアームの先端パーツを器用に取り外します。
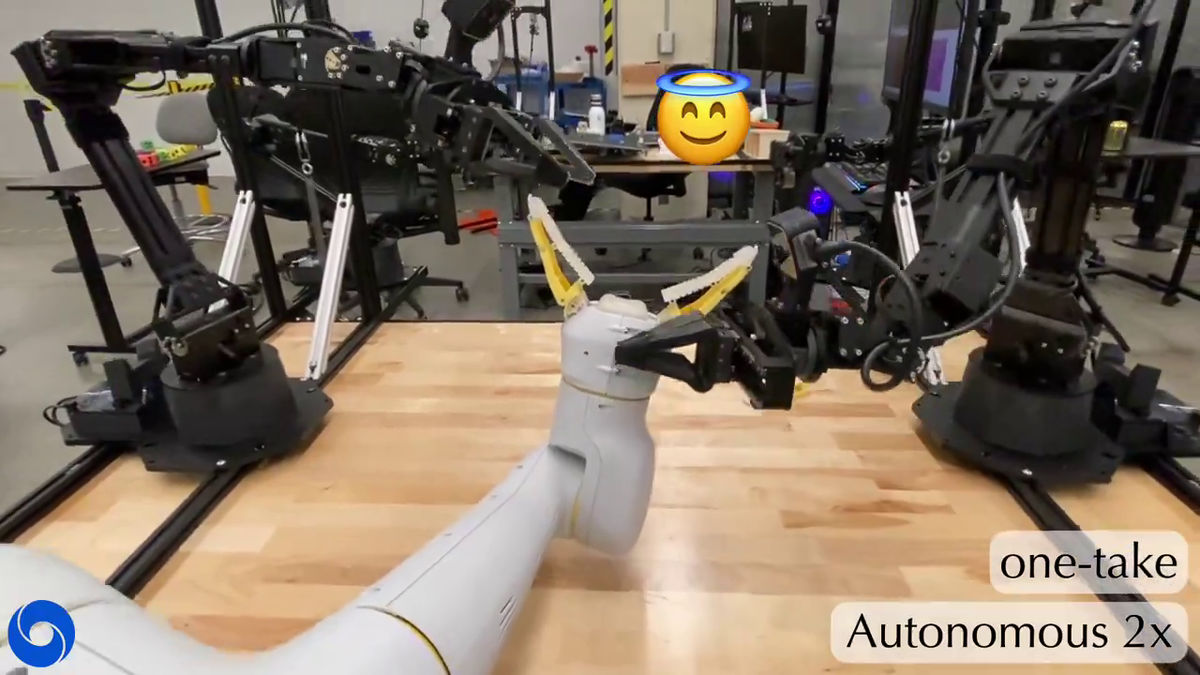
その後、交換用パーツを机の上から持ち上げます。
そして、片方のマニピュレーターでロボットアームの先端部分を固定し、もう片方で交換パーツを取り付け。
成功です。
続いて靴ひもを結ぶことに挑戦。
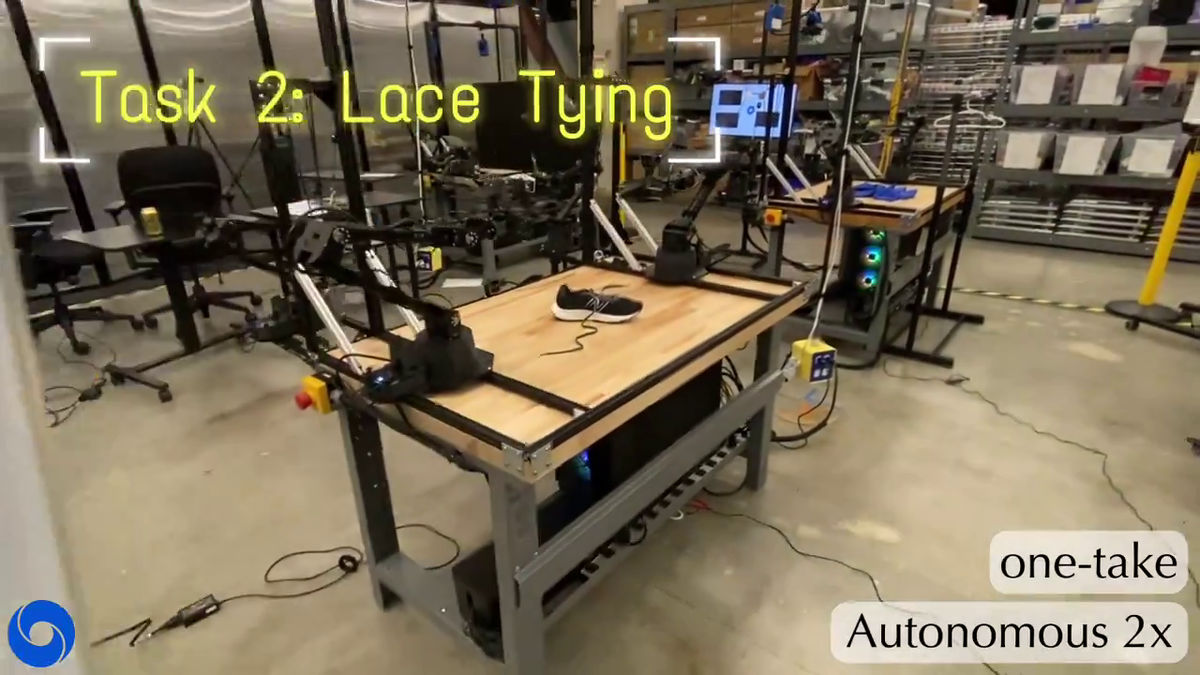
靴ひもをマニピュレーターで器用に伸ばします。

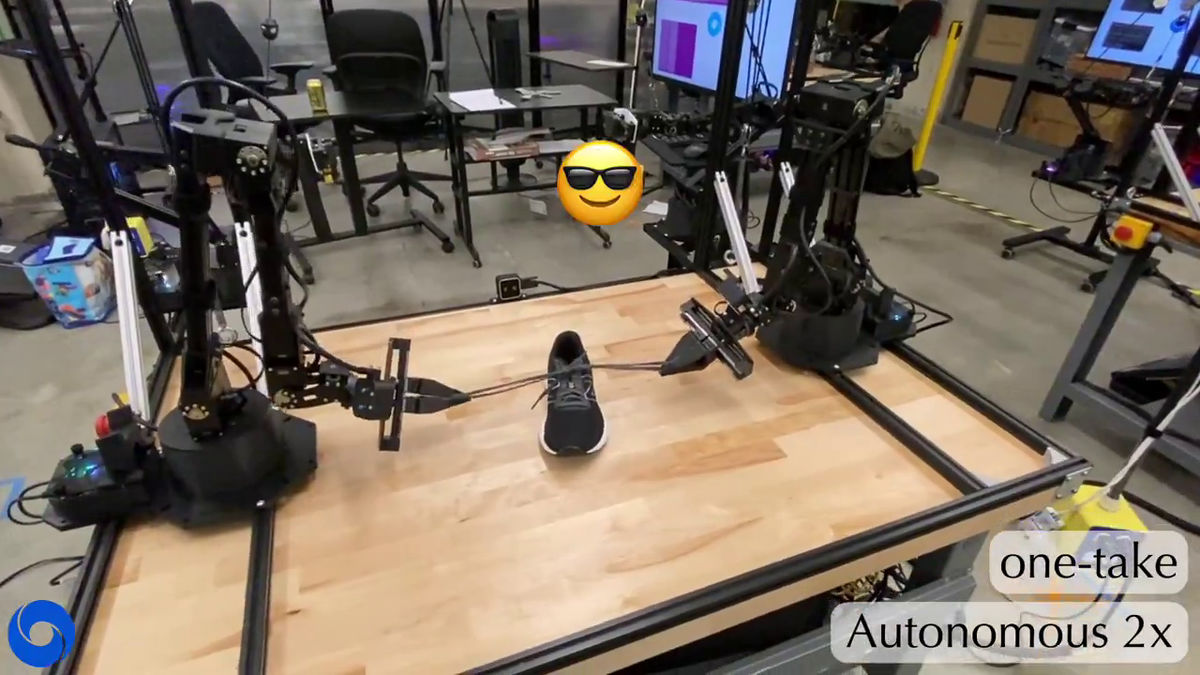
そして、マニピュレーターの先端部分に器用にひっかけ、あやとりのように2本のマニピュレーターでひもを結びます。

ちょうちょ結びに成功。
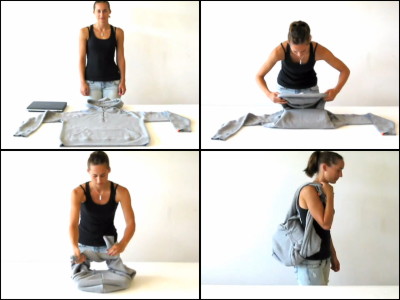
最後はTシャツをハンガーにかけることに挑戦します。

まずは机の上に無造作に置かれたTシャツを器用に伸ばします。

ハンガーを取り出して、襟元からハンガーの片側を挿入。


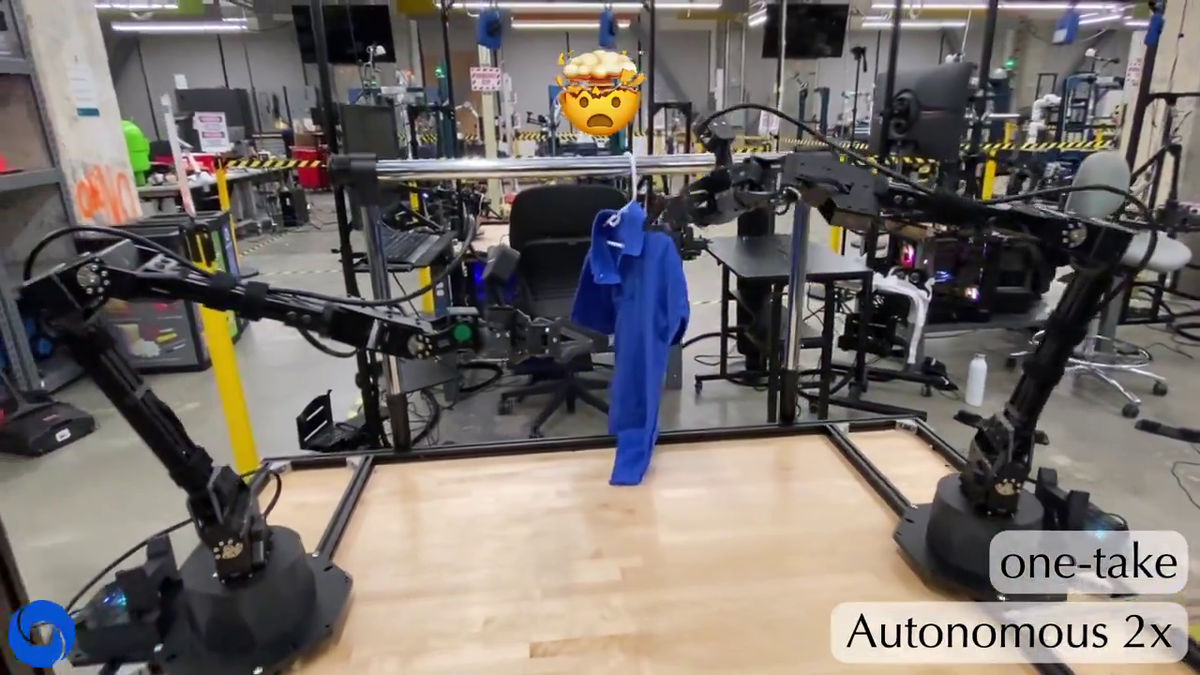
ハンガーを挿入した方をマニピュレーターで固定し、逆側の袖部分をマニピュレーターで引っ張るようにして、器用にハンガーを入れることに成功しました。
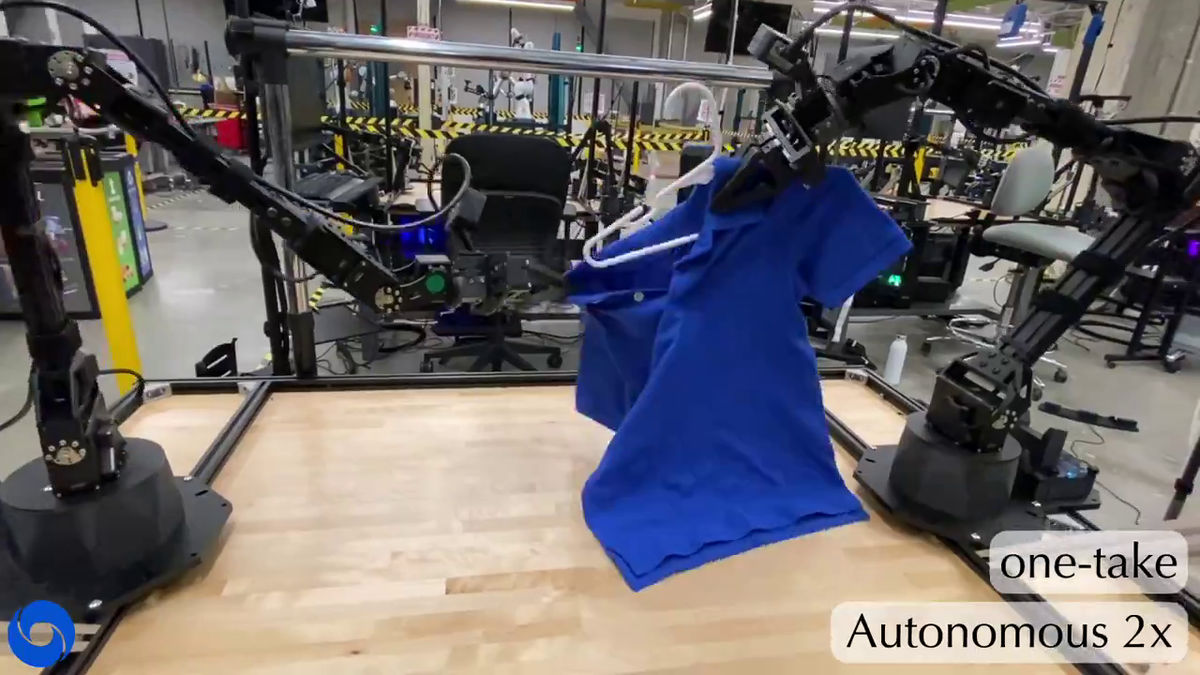

あとはポールにかければ完了です。
この他、Zhao氏ら研究チームはMobile ALOHAの失敗例をまとめた動画も公開しており、器用なロボットの貴重な不器用すぎる瞬間を楽しむことができます。
Mobile ALOHA funny failures - YouTube
・関連記事
Amazonが自社倉庫に新ロボットの「Sequoia」と「Digit」を導入し在庫の特定を最大75%・注文処理を最大25%高速化することに成功 - GIGAZINE
アメリカ空軍が60年以上前に開発した巨大ロボット「ビートル」とは? - GIGAZINE
元Google技術者らが開発した「自由自在に動くアームで物体を持ち運べるロボット」の販売がスタート - GIGAZINE
「ルービックキューブが解ける」高機能なロボットハンド駆動システムの開発が進んでいる - GIGAZINE
Googleがロボット企業7社を買収、Androidの次は本当のロボットを開発か - GIGAZINE
・関連コンテンツ